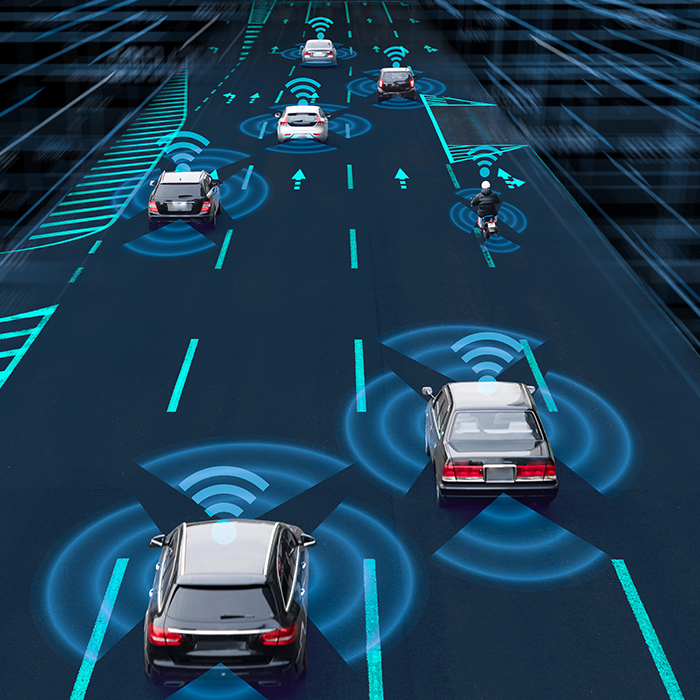
- 传感器及感知
- 借助于视觉��、毫米波���、超声波����、激光雷达����、智能天线等多种传感器以及多传感器深度融合技术����,在各种工况下实时360度感知车身周围行人及各种障碍物����,同时实现车辆行进方向可行驶区域的动态检测���。利用V2X技术实现车与人���、车与基础设施�����、车与车和车与后台的实时连接与通讯��,提供超视距的感知能力���,如实时交通路况���、道路信息����、行人信息等用于车辆综合决策与控制及车联网服务����。
- 定位
- 运用卫星���、RTK���、视觉����、航位推算等多种组合定位技术���,满足在各种复杂场景下的自定位需求�����,同时匹配高精度地图及时准确地“告知”位置信息����,从而实现车道级定位����。
- 规划及决策
- 根据环境感知结果及精准的位置信息���,“智能”规划行进中的路线���。同时根据实时的路况信息���,自主地进行避障���、换道���、跟车���、超车等相关决策��。
- 控制
- 综合考虑车身运动学原理及环境信息�����,在保证安全的前提下����,舒适���、友好地进行车辆横纵向控制���。
网站首页
飞亚体育










 粤公网安备:44130202000627号
粤公网安备:44130202000627号